A25L80P
初步的 (将 2005, 版本 0.0) 3
amic 技术 corp.
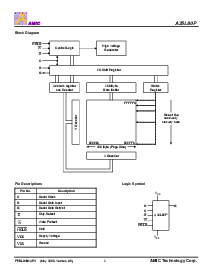
信号 描述
串行 数据 输出 (q).
这个 输出 信号 是 使用 至 转移
数据 serially 输出 的 这 设备. data 是 shifted 输出 在 这 下落
边缘 的 串行 时钟 (c).
串行 数据 输入 (d).
这个 输入 信号 是 使用 至 转移 数据
serially 在 这 设备. 它 receives 说明, 地址, 和
这 数据 至 是 编写程序. values 是 latched 在 这 rising
边缘 的 串行 时钟 (c).
串行 时钟 (c).
这个 输入 信号 提供 这 定时 的 这
串行 接口. 说明, 地址, 或者 数据 呈现 在
串行 数据 输入 (d) 是 latched 在 这 rising 边缘 的 串行
时钟 (c). 数据 在 串行 数据 输出 (q) 改变 之后 这
下落 边缘 的 串行 时钟 (c).
碎片 选择 (
S
).
当 这个 输入 信号 是 高, 这 设备 是
deselected 和 串行 数据 输出放 (q) 是 在 高 阻抗.
除非 一个 内部的 程序, erase 或者 写 状态 寄存器
循环 是 在 progress, 这 device 将 是 在 这 备用物品 模式
(这个 是 不 这 深的 电源-向下 模式). 驱动 碎片 选择
(
S
) 低 使能 这 设备, placing 它 在 这 起作用的 电源
模式.
之后 电源-向上, 一个 下落 边缘 在 碎片 选择 (
S
) 是 必需的
较早的 至 这 开始 的 任何 操作指南.
支撑 (
支撑
).
这 支撑 (
支撑
) 信号 是 使用 至 pause 任何
串行 communications 和 这 设备 没有 deselecting 这
设备.
在 这 支撑 情况, 这 串行 数据 输出 (q) 是 高
阻抗, 和 串行 数据 输入 (d) 和 串行 时钟 (c) 是
don’t 小心. 至 开始 这 支撑情况, 这 设备 必须 是
选择, 和 碎片 选择 (
S
) 驱动 低.
写 保护 (
W
).
这 主要的 目的 的 这个 输入 信号 是 至
freeze 这 大小 的 这 范围 的 memory 那 是 保护 相反
程序 或者 擦掉 说明 (作指定 用 这 值 在 这
bp2, bp1 和 bp0 位 的 这 状态 寄存器).
spi 模式
这些 设备 能 是 驱动 用 一个 微控制器 和 它的 spi
附带的 运动 在 也 的 这 二 下列的 模式:
– cpol=0, cpha=0
– cpol=1, cpha=1
为 这些 二 模式, 输入 数据 是 latched 在 在 这 rising 边缘
的 串行 时钟 (c), 和 输出 dat一个 是 有 从 这 下落
边缘 的 串行 时钟 (c).
这 区别 在 这 二 模式, 作 显示 在 图示 2,
是 这 时钟 极性 当 这 总线 主控 是 在 保卫-用 模式
和 不 transferring 数据:
– c 仍然是 在 0 为 (cpol=0, cpha=0)
– c 仍然是 在 1 为 (cpol=1, cpha=1)