3150
可编程序的, chopper-
stabilized, 精确,
通道-效应 转变
www.allegromicro.com
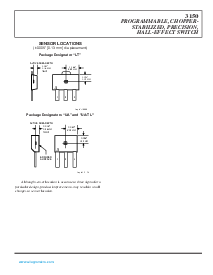
* 在 应用, 这 条款 “gear” 和 “target” 是 常常
interchanged. 不管怎样, “gear” 是 preferred 当 运动
是 transferred.
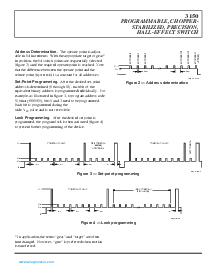
地址 determination.
这 运作 要点 是 调整-
能 在 64 increments. 和 这 适合的 目标 或者 gear*
在 位置, 这 64 转变 点 是 sequentially 选择
(图示 2) 直到 这 必需的 运作 要点 是 reached. 便条
那 这 区别 在 这 运作 要点 和 这
释放 要点 (hysteresis) 是 一个 常量 为 所有 地址.
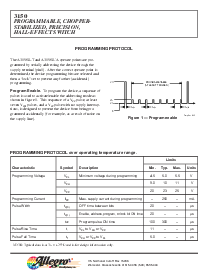
设置-要点 程序编制.
之后 这 desired 设置-要点
地址 是 决定 (0 通过 63), 各自 位 的 这
相等的 二进制的 地址 是 编写程序 individually. 为
例子, 作 illustrated 在 图示 3, 至 程序 地址 代号
5 (二进制的 000101), 位 1 和 3 需要 至 是 编写程序.
各自 位 是 编写程序 在 这
宽 v
PP
脉冲波 和 是 不 reversible.
锁 程序编制.
之后 这 desired 设置 要点 是
编写程序, 这 程序 锁 是 然后 使活动 (图示 4)
至 阻止 更远 程序编制 的 这 设备.
V
PH
V
PL
0
t
d(1)
t
d(0)
dwg. wh-014
地址 0
地址 1
地址 2
地址 n
(向上 至 63)
地址 n-1
地址 n-2
图示 2 — 地址 determination
图示 4 — 锁 程序编制
V
PP
V
PH
V
PL
0
t
d(1)
t
d(0)
dwg. wh-016
t
dP
程序 使能 锁 程序
(65 脉冲)
t
d(1)
图示 3 — 设置-要点 程序编制
V
PP
V
PH
V
PL
0
t
d(1)
t
d(0)
dwg. wh-015
程序 使能
位 1 progr一个
位 3 程序
(000100)
地址 4
t
dP
程序 使能
t
d(1)