8904
3-阶段 brushless 直流
发动机 控制/驱动器
www.allegromicro.com
11
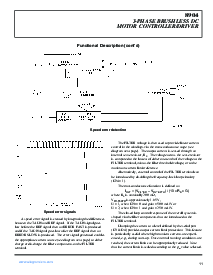
一个 速 错误 信号 是 创建 用 integrating 这 differences
在 这 tach 和 ref 信号. 如果 这 tach 信号 变得
低 在之前 这 ref 信号 然后 一个 错误 快 是 生产
和 如果 这 tach 信号 变得 低 之后 这 ref 信号 然后 一个
错误 慢 是 生产. 这 错误 信号 发生 使能
这 适合的 电流 源 (看 图解 next 页) 至 也
承担 或者 释放 这 过滤 组件 在 这 过滤
终端.
这 过滤 电压 是 然后 使用 至 提供 直线的 电流
控制 在 这 windings 通过 这 跨导 平台 (看
图解 next 页). 这 输出 电流 是 sensed 通过 一个
内部的 sense 电阻, r
S
. 这 电压 横过 这 sense 电阻
是 对照的 至 这 最低 的 也 一个-tenth 的 这 电压 在 这
过滤 终端, minus 这 过滤 门槛 电压, 或者 至 这
最大 电流 限制 涉及.
alternatively, 外部 控制 的 这 过滤 终端 能
是 introduced 用 disabling 这 频率-锁 循环 电路系统
(d24 = 1).
这 跨导 函数 是 定义 作:
I
输出
= (v
过滤
– v
FILTERTH
) / (10 x r
S
x g)
在哪里 r
S
是 nominally 200 m
Ω
,
V
FILTERTH
是 大概 1.85 v,
g = 1, 当 d28 = 0 和 增益 = 500 毫安/v 或者
g = 2, 当 d28 = 1 和 增益 = 250 毫安/v.
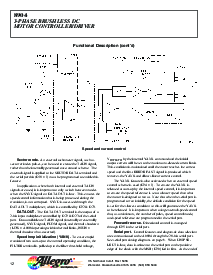
这 关闭 循环 控制 回馈 的 这 整体的 系统 是
shaped 通过 这 过滤 组件 那 是 introduced 在 这
过滤 终端.
夹紧 这 电流 至 一个 水平的 定义 用 这 串行 端口
(d3 &放大; d4) 提供 输出 电流 限制 保护. 这个 特性
是 特别 有用的 在哪里 高 瞬时 电流 是 experi-
enced, e.g., 在 开始-向上. once 正常的 运动 情况 是
reached, 这 电流 限制 能 是 appropriately 减少. 便条
那 这 电流 限制 是 scaled 符合 至 这 g
m
值 选择.
函数的 描述 (内容’d)
速 错误 发现
速 错误 信号