®
DDC101
16
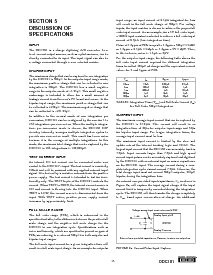
图示 11. 相等的 积分器 输出 为 单独的 integration.
X
X
度量 时间
数字的
输出
M
Aquisition
时间, k
Oversampled
最初的 数据 要点
N
追踪 间隔
时间,
时钟
循环
最终 数据
要点 开始
M
Oversampled
最终 数据 要点
ddc101 数字的 输出 是 准确的 integration 的 输入 在 度量 时间.
图示 12. 关闭-向上 的 最初的 oversampled 数据 要点 为 ddc101.
数字的
输出
Aquisition
时间
重置 的
previous integration
M
时间,
时钟
循环
K
X
Oversampled
最初的 数据 要点
追踪
间隔
有 被 完成; 这个 occurs m 时钟 时期 之后 这
fds 转变 至 “on”. acquisition, 最初的 数据 要点 和
追踪 为 这 next integration follow automatically. 这
ddc101 持续 在 这 追踪 模式 直到 这 next fds
command initiates 这 度量 的 这 m 最终 数据 要点
样本. 一个 fds command 是 需要 为 各自 integration
循环. 在 这 持续的 integration 模式, 这 fds 脉冲波
宽度 必须 是 较少 比 m 时钟 时期. 如果 这 fds 脉冲波
是 使保持 低 past 这个 时间 的 m 时钟 时期, 这 ddc101
将 重置 作 为 非-持续的 模式 (看 也 图示 4).
在 这 持续的 模式 的 运作, 这 追踪 逻辑 的
这 ddc101 “remembers” 这 integration 比率 的 这 previ-
ous integration 和 begins 这 next integration 在 这 比率 的
这 previous integration. 这个 准许 faster acquisition 的 这
信号 为 这 next integration.