13
DSP56001 MOTOROLA
dsp56001 电的 特性
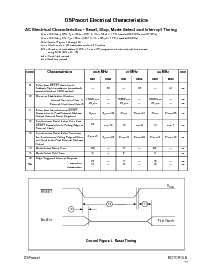
交流 电的 特性 - 重置, 停止, 模式 选择, 和 中断 定时
(持续)
注释:
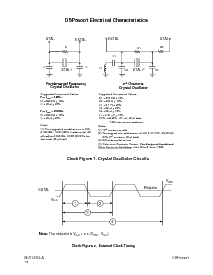
1. 一个 时钟 stabilization 延迟 是 必需的 当 使用 这 在-碎片 结晶 振荡器 在
二 具体情况:
1) 之后 电源-在 重置, 和
2) 当 recovering 从 停止 模式.
在 这个 stabilization 时期, t 将 不 是 常量. 自从 这个 stabilization 时期
varies, 一个 延迟 的 150,000t 是 典型地 允许 至 使确信 那 这 振荡器 是 stabilized
在之前 executing programs. 当 它 是 可能 至 设置 omr 位 6 = 1 当 使用
这 内部的 结晶 振荡器, 它 是 不 推荐 和 这些 规格 做 不
保证 timings 为 那 情况. 看 部分 8.5 在 这
dsp56000/dsp56001 用户’s 手工的
为
额外的 信息.
2. 电路 stabilization 延迟 是 必需的 在 重置 当 使用 一个 外部 时钟 在
二 具体情况:
1) 之后 电源-在 重置, 和
2) 当 recovering 从 停止 模式.
3. 为 修订 b 硅, 这 最小值 和 最大值 号码 是 12cyc+tch+8 和 12cyc+tch+30, respec-
tively.
4. 这 最小 是 指定 为 这 持续时间 的 一个 边缘 triggered irqa
中断 必需的 至 recover
从 这 停止 状态 没有 having 这 irqa
中断 accepted.
5. 定时 #23 是 为 所有 irqx 中断 当 定时 #24 是 仅有的 当 exiting wait.
6. 定时 #23 triggers 止 t1 在 这 正常的 状态 和 止 t1/t3 当 exiting 这 wait 状态.
7. 这 timings 在 这 表格 是 为 rev. c 部分. 这 timings 为 rev. c 部分 是 shorter 用 1 cyc 比
这 rev. b 部分 当 omr6=0
.
Num
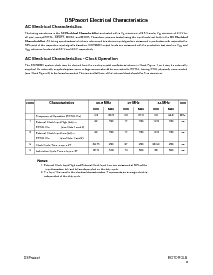
特性 20.5 mhz 27 mhz 33 mhz
单位
最小值 最大值 最小值 最大值 最小值 最大值
23 同步的 中断 建制 时间
从 irqa
, irqbassertion 至 这
同步的 rising 边缘 的 外部
时钟 (看 注释 5, 6)
25 cyc-10 19 cyc-8 16 cyc-7 ns
24 同步的 中断 延迟 时间
从 这 同步的 rising 边缘 的
外部 时钟 至 这 第一 外部
地址 输出 有效的 造成 用 这
第一 操作指南 fetch 之后 coming 输出
的 wait 状态 (看 注释 3, 5)
13
*
cyc+
tch+8
13
*
cyc+
tch+30
13
*
cyc+
tch+6
13
*
cyc+
tch+23
13
*
cyc+
tch+5
13
*
cyc+
tch+19
ns
25 持续时间 为 irqa
assertion 至
recover 从 停止 状态 (看 便条 4) 25 — 19 — 16 — ns
26 延迟 从 irqa
assertion 至 fetch 的
第一 操作指南 (为 停止) 为
内部的 osc / omr 位 6 = 0
External 时钟 / omr 位 6 = 1
(看 注释 1, 2, 和 7)
65545
*
cyc
17
*
cyc
—
—
65545
*
cyc
17
*
cyc
—
—
65545
*
cyc
17
*
cyc
—
—
ns
ns
27 持续时间 为 水平的 敏感的 irqa
assertion 至 fetch 的 第一 中断
操作指南 (为 停止) 为
内部的 osc / omr 位 6 = 0
External 时钟 / omr 位 6 = 1
(看 注释 1, 2, 和 7)
65533
*
cyc
+tcl
5
*
cyc+tcl
—
—
65533
*
cyc
+tcl
5
*
cyc+tcl
—
—
65533
*
cyc
+tcl
5
*
cyc+tcl
—
—
ns
ns
28 延迟 从 水平的 敏感的 irqa
assertion 至 fetch 的 第一 中断
操作指南 (为 停止) 为
Internal osc / omr 位 6 = 0
外部 时钟 / omr 位 6 = 1
(看 注释 1, 2, 和 7)
65545
*
cyc
17
*
cyc
—
—
65545
*
cyc
17
*
cyc
—
—
65545
*
cyc
17
*
cyc
—
—
ns
ns