快 激励 块 数据手册
E
16
产品 预告(展)
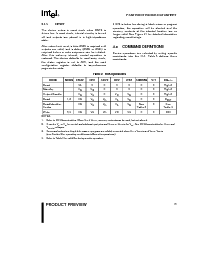
表格 5. 状态 寄存器 定义
WSMS ESS ES PS VPPS PSS DPS R
76543210
注释:
sr.7 = 写 状态 机器 状态 (wsms)
1 = 准备好
0 = busy
审查 sr.7 至 决定 块 擦掉 或者 程序
completion. sr.6
–0 是 invalid 当 sr.7 =“0.”
sr.6 = 擦掉 suspend 状态 (ess)
1 = 块 擦掉 suspended
0 = 块 擦掉 在 progress/完成
当 一个 擦掉 suspend command 是 issued, 这
wsm halts 执行 和 sets 两个都 sr.7 和 sr.6
至
“1.” sr.6 仍然是 设置 直到 一个 擦掉 重新开始
command 是 写 至 这 cui.
sr.5 = 擦掉 状态 (es)
1 = 错误 在 块 erasure
0 = successful 块 擦掉
如果 两个都 sr.5 和 sr.4 是
“1”s 之后 一个 块 擦掉 或者
程序 attempt, 一个 improper command sequence
是 entered.
sr.4 = 程序 状态 (ps)
1 = 错误 在 程序
0 = successful 程序
sr.3 = v
PP
状态 (vpps)
1 = v
PP
低 发现, 运作 abort
0 = v
PP
OK
sr.3 做 不 提供 一个 持续的 v
PP
反馈.
这 wsm interrogates 和 indicates 这 v
PP
水平的
仅有的 之后 一个 块 擦掉 或者 程序 运作. sr.3
是 不 有保证的 至 reports 精确 反馈
当 v
PP
≠
V
pph1/2
或者 v
PPLK
.
sr.2 = 程序 suspend 状态 (pss)
1 = 程序 suspended
0 = 程序 在 progress/完成
当 一个 程序 suspend command 是 issued, 这
wsm halts 执行 和 sets 两个都 sr.7 和 sr.2
至 “1.” sr.2 仍然是 设置 直到 一个 程序 重新开始
command 是 写 至 这 cui.
sr.1 = 设备 保护 状态 (dps)
1 = 块 擦掉 或者 程序 attempted 在 一个
锁 块, 运作 abort
0 = unlocked
如果 一个 块 擦掉 或者 程序 运作 是 attempted 至
一个 锁 块, sr.1 是 设置 用 这 wsm 和 aborts
这 运作 如果 wp# = v
IL
.
sr.0 = 保留 为 future
增强 (r)
sr.0 是 保留 为 future 使用 和 应当 是
masked 输出 当 polling 这状态 寄存器.