gms97c2051/l2051 8-位 cmos 微控制器
hyundai 微电子学
8
表格 6
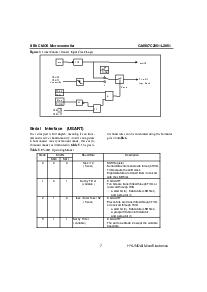
. formulas 为 calculating 波特 比率
波特 比率
发生 从
串行 端口 模式 波特 比率
振荡器 0
2
fosc / 12
(2
SMOD
x fosc) / 64
Timer1
(timer1 mode2)
1 , 3
1 , 3
(2
SMOD
x timer1 overflow 比率) / 32
(2
SMOD
x fosc) / [32 x 12 x (256-th1)]
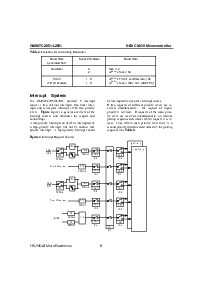
中断 系统
这 gms97c2051/l2051 提供 5 中断
来源 ( 二 外部 中断, 二 计时器 inter-
rupts 和 串行 端口 中断 ) 和 二 priority
水平.
图示 4
给 一个 一般 overview 的 这
中断 来源 和 illustrates 这 要求 和
控制 flags.
一个 低-priority 中断 能 它自己 是 interrupted 用
一个 高-priority 中断, 但是 不 用 另一 低
priority 中断. 一个 高-priority 中断 不能
是 interrupted 用 任何 其它 中断 源.
如果 二 requests 的 不同的 priority 水平 是 re-
ceived 同时发生地, 这 要求 的 高等级的
priority 是 serviced. 如果 requests 的 这 一样 较早的-
ity 水平的 是 received 同时发生地, 一个 内部的
polling sequence 确定 这个 要求 是 serv-
iced. 因此 在里面 各自 priority 水平的 那里 是 一个
第二 priority 结构 决定 用 这 polling
sequence 像
表格 8
.
图示 4
. 中断 要求 来源
计时器 1 overflow
ET1
ie.3
PT1
ip.3
TF1
tcon.7
IT0
tcon.0
tcon.1
IE0
EX0
ie.0
PX0
ip.0
p3.2/
INT0
EA
ie.7
IT1
tcon.2
tcon.3
IE1
EX1
ie.2
PX1
ip.2
p3.3/
INT1
TF0
tcon.5
计时器 0 overflow
ET0
ie.1
PT0
ip.1
1
R1
scon.0
通用同步/异步串行接收/发送器
scon.1
T1
ES
ie.4
PS
ip.4
高 priority
低 priority