dtmf 接受者
hm 9270c/d
- 8 -
C
V
C
R
V
DD
V
DD
st/gt
ESt
S
tD
V
DD
t
GTP
GTA
t
=(rc) ln (
V
V
DD
=(rc) ln (
V
V
DD
-
)
)
TST
TST
0.1
µ
f
V
DD
S
t
GT
/
ES
t
C
R2
R1
V
DD
S
t
gt/
ES
t
C
R2R1
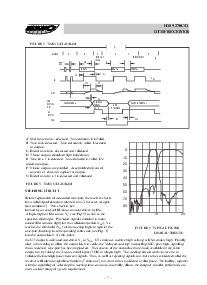
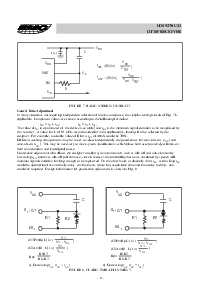
图示 7. 基本 steering 电路
守卫 时间 调整
在 许多 situations 不 需要 独立 选择 的 receive 和 pause, 这 简单的 steering 电路 的 图. 7 是
适用. 组件 值 是 选择 符合 至 这 下列的 formulae:
t
REC
= t
DP
+ t
GTP
t
ID
= t
DA
+ t
GTA
这 值 的 t
DP
是 一个 参数 的 这 设备 (看 表格) 和 t
REC
是 这 最小 信号 持续时间 至 是 公认的 用
这 接受者. 一个 值 为 c 的 0.1 µf 是 推荐 为 大多数 产品, leaving r 至 是 选择 用 这
设计者. 为 例子, 一个 合适的 值 的 r 为 一个 t
REC
的 40ms 将 是 300k.
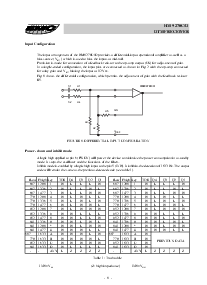
不同的 steering arrangements 将 是 使用 至 选择 independently 这 守卫-时间 为 声调-呈现 (t
GTP
) 和
声调-absent (t
GTA
). 这个 将 是 需要 至 满足 系统 规格 这个 放置 两个都 接受 和 reject 限制 在
两个都 声调 持续时间 和 interdigital pause.
守卫-时间 调整 也 准许 这 设计者 至 tailor 系统 参数 此类 作 表达 止 和 噪音 免除.
增加 t
REC
改进 表达-止 效能, 自从 它 减少 这 probability 那 tones simulated 用 演说 将
维持 信号 情况 为 长 足够的 至 是 注册. 在 这 其它 hand, 一个 相当地 短的 t
REC
和 一个 长 t
做
将 是 适合的 为 极其 嘈杂的 环境 在哪里 快 acquisition 时间 和 免除 至 漏出 - outs
将 是 必需的. 设计 信息 为 守卫-时间 调整 是 显示 在 图. 8.
tgtp=(rp c) 在 (
tgtp=(rp c) 在 (
tgta=(r1 c) 在 (
Rp=
tgta=(r1 c) 在 (
Rp=
V
DD
- v
TST
V
DD
V
DD
- v
TST
V
DD
)
V
TST
V
DD
)
)
V
TST
V
DD
)
R1+R2
R1R2
R1+R2
R1R2
一个) 减少 t
GTP
(t
GTP
< t
GTA
) b) 减少 t
GTP
(t
GTP
> t
GTA
)
图示 8. 守卫 时间 调整