低-power, 回转-比率-限制
rs-485/rs-422Transceivers
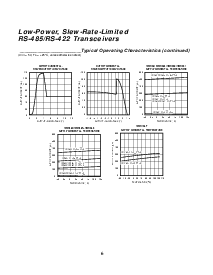
_______________________________________________________切换Waveforms
DI
3V
0V
Z
Y
V
O
0V
-v
O
V
O
1.5v
t
PLH
1/2 v
O
10%
t
R
90%
90%
t
PHL
1.5v
1/2 v
O
10%
t
F
V
DIFF
= v (y) - v (z)
V
DIFF
t
skew =
| t
PLH
- t
PHL
|
输出 正常情况下 低
输出 正常情况下 高
3V
0V
y, z
V
OL
y, z
0V
1.5v1.5v
V
OL
+0.5v
V
OH
-0.5v
2.3v
2.3v
t
zl(shdn)
, t
ZL
t
LZ
t
zh(shdn)
, t
ZH
t
HZ
DE
V
OH
V
OL
V
ID
-v
ID
1.5v
0V
1.5v
输出
输入
0V
RO
一个-b
t
PLH
t
PHL
输出 正常情况下 低
输出 正常情况下 高
3V
0V
V
CC
RO
RO
0V
1.5v1.5v
V
OL
+ 0.5v
V
OH
- 0.5v
1.5v
1.5v
t
zl(shdn)
, t
ZL
t
LZ
t
zh(shdn)
, t
ZH
t
HZ
RE
_________________函数Tables
(
HWD
481/
HWD
483/
HWD
485/
HWD
487/
HWD
1487)
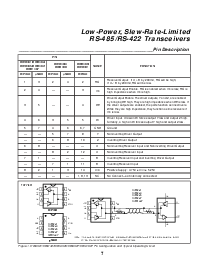
图示 8. 驱动器 传播 延迟Figure9.Driver 使能 和 使不能运转 时间 (除了 hwd488 和
hwd490)
图示 10. 接受者 传播 延迟
图示 11. 接受者 使能 和 使不能运转 时间 (除了 hwd488
和 hwd490)
表格 1. transmitting表格 2. 接到
输入输出
REDE一个-bRO
0
0
0
1
0
0
0
0
> +0.2v
< -0.2v
输入 打开
X
1
0
1
高-z
*
x = don't 小心
高-z = 高 阻抗
*
关闭 模式 为 hwd481/hwd483/hwd487
输入输出
RE
DEDIZY
X
X
0
1
1
1
0
0
1
0
X
X
0
1
高-z
高-z
*
1
0
高-z
高-z
*
x = don't 小心
高-z = 高 阻抗
*
关闭 模式 为 hwd481/hwd483/hwd487
10