11
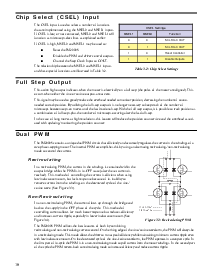
这 im2000s 将 automatically 改变 这 非-recirculating 脉冲波 widths
至 compensate 为 改变 在 供应 电压 和 accommodate 一个 宽
多样性 的 发动机 inductances. 这个 方法 也 准许 为 这 使用 的 非常
低 电感 发动机, 当 utilizing 一个 20khz chopping 比率 这个
减少 发动机 加热 但是 维持 高 效率 和 低 电流
波纹.
fixed pwm 类型
这 内部的 pwm 在 这 im2000s 将 也 是 放置 在 一个 fixed
recirculating 或者 非-recirculating 模式 用 这 使用 的 这 cir0 和
cir1 输入. 这 relationship 在 这 states 的 这 cir0 和
cir1 输入 和 这 方法 的 电流 控制 是 显示 在 表格 3.3.
表格 3.3: 电流 控制 模式 settings
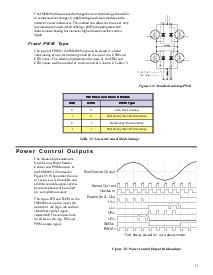
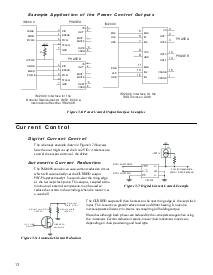
电源 控制 输出
这 relationship 在 这
sine\cosine, 电源 部分
控制 和 pwm 输出 的
这 im2000s 是 illustrated 在
图示 3.5. 当 也 这 sine
或者 cosine 是 在 0, 这 使能 和
所有 驱动 控制 输出 为 那
particular 阶段 将 是 转变
止 至 改进 精度.
这 输入 ihi 和 ilow 至 这
im2000s 是 使用 至 invert 这
极性 的这 高 一侧 和 低
一侧 驱动器 控制 信号
各自. 这些 输入 有
非 效应 在 这 sign, en, 和
pwm 输出 信号.
图示 3.5: 电源 控制 输出 relationships
sine\cosine 输出
sense 电流
振荡器
使能 (在 &放大; 输出)
HLx
HRx
LRx
SIGNx
PWMx
LLx
**
**
*fast decay 时期 为 自动 decay 模式.
sedoMlortnoCtnerruCMWPsedoMlortnoCtnerruCMWP
sedoMlortnoCtnerruCMWP
sedoMlortnoCtnerruCMWPsedoMlortnoCtnerruCMWP
1RIC1RIC
1RIC
1RIC1RIC 0RIC0RIC
0RIC
0RIC0RIC epyTMWPepyTMWP
epyTMWP
epyTMWPepyTMWP
00 gnitalucricer-otua
1 0 )gnitalucricer-非(yacedtsaf
01 )gnitalucricer(yacedwols
1 1 )gnitalucricer-非(yacedtsaf
图示 3.4: 非-recirculating pwm
驱动 电流
快 decay