LA9242M
非.7097–7/20
描述 的 运作
1. apc (自动 激光器 电源 控制)
这个 电路 控制 这 pickup 激光器 电源. 这 激光器 是 转变 在 和 止 用 commands 从 这 微控制器.
2. rf 放大器 (eye 模式 输出)
这 pickup photodiode 输出 电流 (a+c) 是 输入 至 fin2 (管脚 1), 和 (b+d) 是 输入 至 fin1 (pin 2). 这
电流 那 是 输入 是 转变 至 这 电压, passes 通过 这 agc 电路, 和 是 然后 输出 从 这 rfsm
放大器 输出 rfsm (管脚 41). 这 内部的 agc 电路 有 一个 能变的 范围 的
±
3db, 和 这 时间 常量 能
是 changed 通过 这 外部 电容 连接 至 ph1 (管脚 60). 在 增加, 这个 电路 也 控制 这
bottom 水平的 的 这 efm 信号 (rfsm 输出), 和 这 回馈 能 是 changed 通过 这 外部 电容
连接 至 bh1 (管脚 61). 这 中心 增益 设置 为 这 agc 能变的 范围 是 设置 用 这 阻抗 在
rfsm (管脚 41) 和 rfs
–
(管脚 42) ; 如果 需要, 这个 阻抗 是 也 使用 为 3t 补偿 为 这 efm
信号. 如果 rw disc 是 发现, 输入 信号 增益 是 设置 高 用 rw (管脚 38) 这个 accepts 低 从 这 dsp.
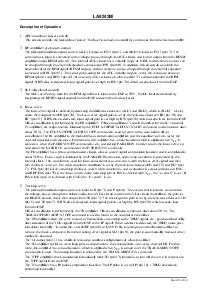
3. slc (slice 水平的 控制)
这 slc sets 这 职责 比率 为 这 efm 信号 那 是 输入 至 这 dsp 至 50%. 这 直流 水平的 决定 用
integrating 这 efmo 信号 输出 从 这 dsp 至 决定 这 职责 因素.
4. focus 伺服
这 focus 错误 信号 是 获得 用 detecting 这 区别 在 (a+c) 和 (b+d), 这个 是 (b+d) – (a+c),
和 是 然后 输出 从 fe (管脚 20). 这 focus 错误 信号 增益 是 设置 用 这 阻抗 在 fe (管脚 20) 和
FE
–
(管脚 21). 如果 rw disc 是 发现, 输入 信号 增益 是 设置 高 用 rw (管脚 38) 这个 accepts 低 从 这 dsp.
补偿 cancellation 是 执行 用 这 fe 放大器. “offset cancellation” cancels 这 补偿 为 这 ic’s 内部的
iv 放大器, 等 调整 是 initiated 用 这 focus-补偿 调整 开始 command, 和 terminates 之后
关于 30 ms. 这 focus-补偿 调整 止 command 是 使用 至 返回 至 这 状态 在之前 补偿
cancellation.这 fa 放大器 是 这 pickup 阶段 补偿 放大器, 和 这 equalizer 曲线 是 设置 用 这
外部 电容 和 阻抗. 此外, 这个 amplifer 有 一个 沉默的 函数 这个 是 应用 当 v
CC
是
转变 在, 当 这 f-伺服 止 command 是 sent, 和 在 f-搜索. 在 顺序 至 转变 这 focus 伺服 on,
send 也 这 激光器 在 command 或者 这 f-伺服 在 command.
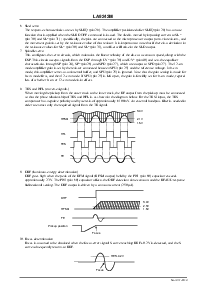
这 fd 放大器 有 一个 阶段 补偿 电路, 一个 focus 搜索 信号 composition 函数 和 是 完成 在
关于 560 ms. focus seach 是 initiated 用 这 f-搜索 command, 和 一个 ramp 波形 是 发生 用 这
内部的 时钟. 这个 波形 是 使用 为 focus 发现 (focus 零 交叉) 和 这 focus 错误 信号 和 然后
转变 这 focus 伺服 在. 这 ramp 波形 振幅 是 设置 用 这 阻抗 在 fd (管脚 16) 和 fd
–
(管脚
17). fsc (管脚 46) 是 为 smoothing 这 focus 搜索 ramp 波形, 和 一个 电容 是 连接 在 fsc
和 ref. fss (管脚 55) 是 这 focus 搜索 模式 切换 管脚. 如果 fss 是 短接 和 v
CC
, 这 “+ search” 是 设置 ; 如果
fss 是 left 打开 或者 是 短接 和 地, 这 “
±
search” 是 设置.
5. 追踪 伺服
这 pickup photodiode 输出 电流 是 输入 至 e (管脚 3) 和 f (管脚 4). 这 电流 那 是 输入 是 转变 至
这 电压, passes 通过 这 balance 调整 vca 电路 和 然后 这 vca 电路 那 跟随 这 增益 在
这 rfagc 电路, 和 是 然后 输出 从 te (管脚 7). 这 追踪 错误 增益 是 设置 用 这 阻抗 在 te
–
(管脚 6) 和 te (管脚 7). 如果 rw disc 是 detected, 输入 信号 增益 是 设置 高 用 rw (pin 38) 这个 accepts 低
从 这 dsp.
补偿 cancellation 是 执行 用 这 te 放大器. 补偿 cancellation terminates 之后 关于 30 ms. 这
追踪-补偿 调整 止 command 是 使用 至 返回 至 这 状态 在之前 这 补偿.
这 th 放大器 改变 这 伺服 回馈 特性 符合 至 这 thld 信号, 等., 发生 内部
之后 发现 的 这 tgl 信号 从 这 dsp 或者 这 jp 信号. 当 一个 defect 是 发现, 这 thld 模式 变得
在 效应 内部. 至 避免 这个, 短的 def (管脚 49) 至 l=gnd. 用 inserting 一个 外部 通带 过滤 至
除去 这 shock 组件 从 这 追踪 错误 信号 在 sci (管脚 9), 这 增益 是 automatically boosted 当
一个 defect 是 发现.
这 ta 输出 (管脚 11) 有 一个 建造-在 阻抗 至 准许 配置 的 一个 低-通过 filter.
这 td 放大器 执行 伺服 循环 阶段 补偿 ; 这 特性 是 设置 用 外部 cr. 更远-
更多, 这个 amplifer 有 一个 沉默的 函数, 这个 是 应用 当 v
CC
是 转变 在 或者 这 追踪-伺服 止
command 是 issued. 这 噪声抑制 函数 是 released 用 这 追踪-伺服 在 command.
这 toff 放大器 那 是 positioned 立即 之后 td (管脚 13) 功能 至 转变 止 这 伺服 在 回馈 至
这 toff 信号 从 这 dsp.
这 至 放大器 有 一个 jp 脉冲波 composition 函数. 这 jp 脉冲波 是 设置 用 jp (管脚 14). (thld 发现 是
执行 内部.)