LA9242M
非.7097–8/20
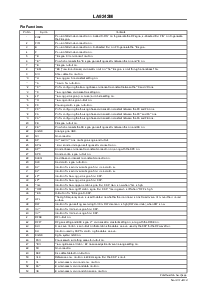
6. sled 伺服
这 回馈 特性 是 设置 用 sleq (管脚 28). 这 放大器 positioned 之后 sleq (管脚 28) 有 一个 沉默的
函数 那 是 应用 当 这 sled 止 command 是 issued. 这 sled 是 moved 用 inputting 电流 至 sl
–
(管脚 30) 和 sl
+
(管脚 31) ; specifically, 这 管脚 是 连接 至 这 微处理器 输出 端口 通过 电阻器, 和
这 movement 增益 是 设置 用 这 阻抗 值 的 那 电阻. 它 是 重要的 至 便条 那 如果 那里 是 一个 背离 在
这 阻抗 值 为 sl
–
(管脚 30) 和 sl
+
(管脚 31), 一个 补偿 将 arise 在 这 sld 输出.
7. spindle 伺服
这个 configures 这 伺服 电路, 这个 维持 这 直线的 velocity 的 这 disc 在 一个 常量 速, along 和 这
dsp. 这个 电路 accepts 信号 从 这 dsp 通过 cv
–
(管脚 39) 和 cv
+
(管脚 40) 和 sets 这 equalizer
特性 通过 sp (管脚 24), sp
–
(pin26), 和 spd (管脚 27), 这个 是 输出 至 spd (管脚 27). 这 12-cm
模式 放大器 增益 是 设置 用 这 电阻 连接 在 spg (管脚 25) 和 这 涉及 电压. 在 8-cm
模式, 这个 放大器 serves 作 一个 内部的 缓存区, 和 spg (管脚 25) 是 ignored. 便条 那 这 增益 设置 是 制造 为
8-cm 模式 第一, 和 然后 12-cm 模式. 如果 spg (pin 25) 是 left open, 这 增益 是 forcibly 设置 为 8-cm mode, regard-
较少 的 whether 8-cm 或者 12-cm 模式 是 在 效应.
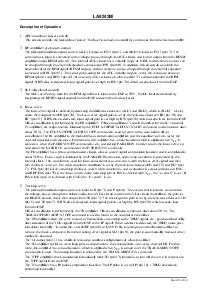
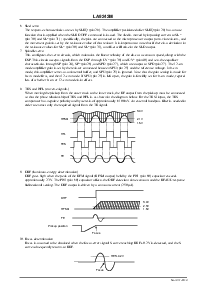
8. tes 和 hfl (traverse 信号)
当 移动的 这 pickup 从 这 outer 追踪 至 这 inner 追踪, 这 ef 输出 从 这 pickup 必须 是 连接
所以 那 这 阶段 relationship 的 tes 和 hfl 是 作 显示 在 这 图解 在下. 为 这 tesi 输入, 这 tes
比较器 有 负的 极性 和 hysteresis 的 大概
±
100mv. 一个 外部 通带 过滤 是 需要 在
顺序 至 extract 仅有的 这 必需的 信号 从 这 te 信号.
9. drf (发光的 活力 determination)
drf 变得 高 当 这 顶峰 的 这 efm 信号 (rfsm 输出) 使保持 用 这 ph1 (管脚 60) 电容 超过
大概 2.3v. 这 ph1 (管脚 60) 电容 affects 这 drf 发现 时间 常量 和 这 rfagc 回馈
双向的 设置. 这 drf 输出 是 驱动 用 一个 常量 电流 (250
µ
一个).
10. focus determination
focus 是 assumed 至 是 得到 当 这 focus 错误 信号 s 曲线 reaching ref +0.2v 是 发现, 和 这 s
曲线 subsequently returns 至 ref.
RFSM
DRF
RFSM
FE
pickup 位置
HFL
TES
TE
3.0v
2.1v
1.5v
Focus
3.0v
2.3v
1.5v
Focus
ref+0.2v