这个 调整 运作 必须 是 执行 在 这 disc pit 范围, 不 在 这 disc mirror 范围. 便条 那
产品 必须 引领 measures 至 使确信 那 一个 稳固的 te 信号 是 acquired 所以 那 追踪 kick 行动 做 不 出现
在 这 调整. (这个 包含 sled 喂养 commands 从 这 微控制器.)
这 e/f balance 调整 精确 和 调整 范围 能 是 设置 至 是 最优的 为 这 pickup 特性 用
这 值 的 这 电阻 在 tbc (管脚 54) 和 这 涉及 电压, vr.
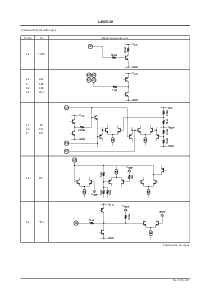
6. sled 伺服
这 回馈 特性 是 设置 在 sleq (管脚 27). 这 放大器 那 跟随 sleq 有 一个 噪声抑制 函数, 和
这 sled 伺服 能 是 转变 止 用 设置 slof (管脚 33) 高.
sled 喂养 是 执行 在 一个 电流 输入 表格 在 sl
–
(管脚 29) 和 sl+ (管脚 30). 在 particular, 一个 电阻 是 连接
至 一个 微控制器 输出 端口 和 这 喂养 增益 是 设置 用 这 值 的 那 电阻.
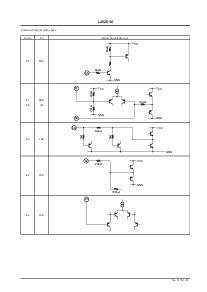
7. spindle 伺服
一个 伺服 电路 那 holds 这 disc 在 一个 常量 直线的 velocity 是 formed 用 这 内部的 伺服 电路 在 conjunction
和 这 dsp. 一个 信号 从 这 dsp 是 accepted 用 clv (管脚 45), 和 输出 从 spd (管脚 26). 这 阶段
补偿 特性 是 设置 用 sp (管脚 23), sp
–
(管脚 25), 和 spd. 这 12 cm 模式 放大器 增益 是 设置 用 一个
电阻 连接 在 spg (管脚 24) 和 这 涉及 电压. 在 8 cm 模式, 这个 放大器 是 内部 缓冲
和 不 影响 用 spg. 这 电路 switches 至 8 cm 模式 当 sp8 (管脚 35) 是 设置 高.
8. tes 和 hfl (traversal 信号)
这 sub-beam 信号 从 这 pickup 是 连接 至 e (管脚 3) 和 f (管脚 4) 所以 那 hfl 和 tes 有 这 阶段
relationship 显示 在 这 图示 当 这 pickup moves 从 这 外部 对着 这 inside 的 这 disc. 这 tes
比较器 有 一个 hysteresis 的 关于 ±100 mv 在 这 minus 极性 的 这 比较器 和 遵守 至 这 tesi (管脚
8) 输入. 一个 外部 通带 过滤 是 formed 所以 那 仅有的 这 必需的 信号 是 提取 从 这 te 信号.
9. drf (视力的 水平的 decision)
一个 顶峰 支撑 运作 是 应用 至 这 efm 信号 (rf 输出) 用 一个 电容 在 ph1 (管脚 60), 和 drf 变得 高
当 这 rf 顶峰 值 超过 关于 1.3 v (当 v
CC
= 3.0 v). 这 ph1 电容 是 related 至 这 settings 的 两个都
这 drf 发现 时间 常量 和 这 rf agc 回馈.
非. 6125-13/17
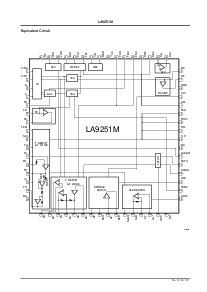
LA9251M
RFSM
HFL
TES
TE
2.0 v
1.4 v
1.0 v
A12224
DRF
RFSM
FE
pickup 位置
Focus
2.0 v
1.3 v
1.0 v
A12225