LR38603
10
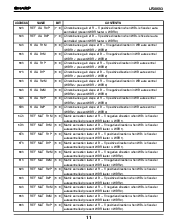
38h awb_qp_l [7 : 0] 外部, q-axis 积极的 的 awb 发现 范围 (在 快 处理)
39h awb_qm_l [7 : 0] 外部, q-axis 负的 的 awb 发现 范围 (在 快 处理)
3Ah awb_ip_s [7 : 0] inside, i-axis 积极的 的 awb 发现 范围 (在 正常的 处理)
3Bh awb_im_s [7 : 0] inside, i-axis 负的 的 awb 发现 范围 (在 正常的 处理)
3Ch awb_qp_s [7 : 0] inside, q-axis 积极的 的 awb 发现 范围 (在 正常的 处理)
awb_iw_l [6 : 0] 白 范围, i-axis, 外部 (为 hysteresis).
3Fh awb_qw_l [6 : 0] 白 范围, q-axis, 外部 (为 hysteresis).
40h awb_iw_s [7 : 4] 白 范围, i-axis, inside (为 targeted 白 范围).
awb_qw_s [3 : 0] 白 范围, q-axis, inside (为 targeted 白 范围).
41h awb_c_i [7 : 4] wb convergence 方向, i-axis coordinate (complement 的 2)
awb_c_q [3 : 0] wb convergence 方向, q-axis coordinate (complement 的 2)
42h WBR1 [7 : 0] WB
1
r 一侧 常量 (9 位 数据 这个 包含 0 在 msb)
43h WBB1 [7 : 0] WB
1
b 一侧 常量 (9 位 数据 这个 包含 0 在 msb)
44h WBR2 [7 : 0] WB
2
r 一侧 常量 (9 位 数据 这个 包含 0 在 msb)
45h WBB2 [7 : 0] WB
2
b 一侧 常量 (9 位 数据 这个 包含 0 在 msb)
46h WBR3 [7 : 0] WB
3
r 一侧 常量 (9 位 数据 这个 包含 0 在 msb)
47h WBB3 [7 : 0] WB
3
b 一侧 常量 (9 位 数据 这个 包含 0 在 msb)
48h ref_ga_r1m [7 : 0] chrominance 增益 的 r – y 负的 方向 当 wb
1
是 fixed 或者 自动-
控制 (呈现 wbr 因素 ≤ wbr1).
49h ref_ga_b1m [7 : 0] chrominance 增益 的 b – y 负的 方向 当 wb
1
是 fixed 或者 自动-
控制 (呈现 wbr 因素 ≤ wbr1).
ref_ga_r1p [7 : 0] chrominance 增益 的 r – y 积极的 方向 当 wb
1
是 fixed 或者 自动-
控制 (呈现 wbr 因素 ≤ wbr1).
4Bh ref_ga_b1p [7 : 0] chrominance 增益 的 b – y 积极的 方向 当 wb
1
是 fixed 或者 自动-
控制 (呈现 wbr 因素 ≤ wbr1).
ref_ga_r2m [7 : 0] chrominance 增益 的 r – y 负的 方向 当 wb
2
是 fixed 或者 自动-
控制 (呈现 wbr 因素 ≤ wbr2).
4Dh ref_ga_b2m [7 : 0] chrominance 增益 的 b – y 负的 方向 当 wb
2
是 fixed 或者 自动-
控制 (呈现 wbr 因素 ≤ wbr2).
4Eh ref_ga_r2p [7 : 0] chrominance 增益 的 r – y 积极的 方向 当 wb
2
是 fixed 或者 自动-
控制 (呈现 wbr 因素 ≤ wbr2).
4Fh ref_ga_b2p [7 : 0] chrominance 增益 的 b – y 积极的 方向 当 wb
2
是 fixed 或者 自动-
控制 (呈现 wbr 因素 ≤ wbr2).
50h ref_ga_r3m [7 : 0] chrominance 增益 的 r – y 负的 方向 当 wb
3
是 fixed 或者 自动-
控制 (呈现 wbr 因素 ≤ wbr3).
51h ref_ga_b3m [7 : 0] chrominance 增益 的 b – y 负的 方向 当 wb
3
是 fixed 或者 自动-
控制 (呈现 wbr 因素 ≤ wbr3).
3Dh awb_qm_s [7 : 0] inside, q-axis 负的 的 awb 发现 范围 (在 正常的 处理)
3Eh
4Ah
4Ch
地址
名字 位 内容
cwpa_iq [7 : 0] 位置 和 范围 的 awb 中心.
35h ctld_aw0 [7 : 0] 重置 范围 的 wb 框架 (对照的 和 iris)
36h awb_ip_l [7 : 0] 外部, i-axis 积极的 的 awb 发现 范围 (在 快 处理)
37h awb_im_l [7 : 0] 外部, i-axis 负的 的 awb 发现 范围 (在 快 处理)
34h