MC33035
14
motorola 相似物 ic 设备 数据
图示 31. 差别的 输入 速 控制
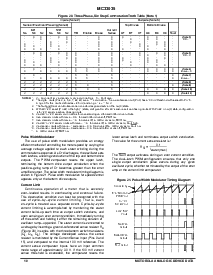
图示 32. 控制 acceleration/deceleration
R
4
R
2
R
1
R
3
13
V
B
V
一个
REF
PWM
EA
8
7
11
12
V
管脚
13
+
V
一个
ǒ
R
3
)
R
4
R
1
)
R
2
Ǔ
R
2
R
3
*
ǒ
R
4
R
3
V
B
Ǔ
电阻 r
1
和 电容 c sets 这 acceleration 时间 常量 当 r
2
控制 这 deceleration. 这 值 的 r
1
和 r
2
应当 是 在 least ten
时间 更好 比 这 速 设置 分压器 至 降低 时间 常量
变化 和 不同的 速 settings.
R
1
EA
R
2
8
PWM
C
使能
增加
速
7
12
11
13
REF
25
µ
一个
25
µ
一个
PWM
EA
8
7
11
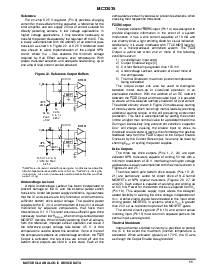
这 sn74ls145 是 一个 打开 集电级 bcd 至 一个 的 ten 解码器. 当 con-
nected 作 显示, 输入 代号 0000 通过 1001 步伐 这 pwm 在
increments 的 大概 10% 从 0 至 90% on–time. 输入 代号 1010
通过 1111 将 生产 100% on–time 或者 全部 发动机 速.
图示 33. 数字的 速 控制 图示 34. 关闭 循环 速 控制
16
V
CC
地
Q
0
2
40.4 k
8
P0
BCD
输入
Q
9
Q
8
Q
7
Q
6
Q
5
Q
4
Q
3
Q2
Q
1
P3
P2
P1
100 k
1
51.3 k
3
4
5
6
7
63.6 k
77.6 k
92.3 k
108 k
9
126 k
11
145 k
166 k
10
5.0 v
SN74LS145
REF
15
14
13
12
25
µ
一个
13
12
13
REF
PWM
EA
8
7
11
12
这 rotor 位置 传感器 能 是 使用 作 一个 tachometer. 用 differentiating
这 positive–going edges 和 然后 integrating 它们 在 时间, 一个 电压
均衡的 至 速 能 是 发生. 这 错误 放大 比较 这个
电压 至 那 的 这 速 设置 至 控制 这 pwm.
0.22
1.0 m
0.1
100 k
0.01
10 k
10 k
1.0 m
至 传感器
输入 (管脚 4)
25
µ
一个
13
REF
PWM
EA
8
7
11
12
这个 电路 能 控制 这 速 的 一个 冷却 风扇 均衡的 至 这 区别
在 这 传感器 和 设置 温度. 这 控制 循环 是 关闭 作 这
强迫 空气 cools 这 ntc thermistor. 为 控制 加热 产品,
exchange 这 positions 的 r
1
和 r
2
.
图示 35. 关闭 循环 温度 控制
T
R
1
R
6
R
5
R
2
R
3
R
4
V
B
+
V
ref
ǒ
R
5
R
6
)
1
Ǔ
R
3
§§
R
5
ø
R
6
V
Pi
n
3
+
V
ref
ǒ
R
3
)
R
4
R
1
)
R
2
Ǔ
R
2
R
3
*
ǒ
R
4
R
3
V
B
Ǔ
25
µ
一个