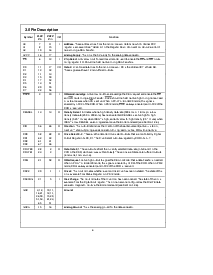
30 寄存器 描述
(持续)
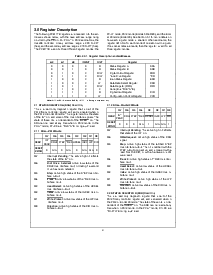
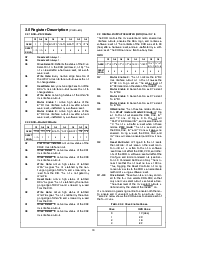
321 SRBPS2 模式
D7 D6 D5 D4 D3 D2 D1 D0
DESC
1 1 DR0 WDATA RDATA WGATE MTR1 MTR0
重置
NA NA 0 0 0 0 0 0
COND
D7 Reserved
总是 1
D6 Reserved
总是 1
D5 驱动 选择 0
Reflects 这 状态 的 这 驱动
选择 0 位 在 这 DOR (地址 2 位 0) 这个
位 是 cleared 之后 一个 硬件 reset 不 一个 软-
ware reset
D4 写 Data
每 inactive 边缘 转变 的
这 WDATA disk 接口 输出 导致 这个 位
至 改变 states
D3 读 Data
每 积极的 边缘 转变 的 这
RDATA disk 接口 输出 导致 这个 位 至
改变 states
D2 写 Gate
起作用的 高 状态 的 这 WGATE
disk 接口 output
D1 发动机 使能 1
起作用的 高 状态 的 这
MTR1 disk 接口 output 低 之后 一个 hard-
ware reset unaffected 用 一个 软件 reset
D0 发动机 使能 0
起作用的 高 状态 的 这
MTR0 disk 接口 output 低 之后 一个 hard-
ware reset unaffected 用 一个 软件 reset
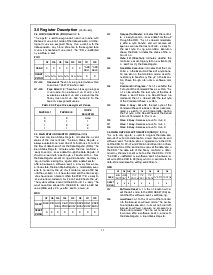
322 SRBModel 30 模式
D7 D6 D5 D4 D3 D2 D1 D0
DESC
DRV2 DR1 DR0 WDATA RDATA WGATE DR3 DR2
重置
NA 1 1 0 0 0 1 1
COND
D7 2nd 驱动 安装
起作用的 低 状态 的 这
DRV2 disk 接口 input
D6 驱动 选择 1
起作用的 低 状态 的 这 DR1
disk 接口 output
D5 驱动 选择 0
起作用的 低 状态 的 这 DR0
disk 接口 output
D4 写 Data
起作用的 高 状态 的 latched
WDATA signal 这个 位 是 latched 用 这 inac-
tive going 边缘 的 WDATA 和 是 cleared 用 一个
读 从 这 DIR 这个 位 是 不 gated 用
WGATE
D3 读 Data
起作用的 高 状态 的 latched
RDATA signal 这个 位 是 latched 用 这 inactive
going 边缘 的 RDATA 和 是 cleared 用 一个 读
从 这 DIR
D2 写 Gate
起作用的 高 状态 的 latched
WGATE signal 这个 位 是 latched 用 这 起作用的
going 边缘 的 WGATE 和 是 cleared 用 一个 读
从 这 DIR
D1 驱动 选择 3
起作用的 低 状态 的 这 DR3
disk 接口 output
D0 驱动 选择 2
起作用的 低 状态 的 这 DR2
disk 接口 output
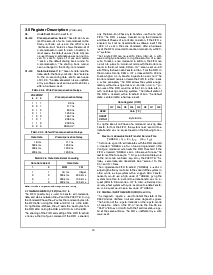
33 数字的 输出 寄存器 (dor)
ReadWrite
这 DOR 控制 这 驱动 选择 和 发动机 使能 disk
接口 outputs 使能 这 DMA logic 和 包含 一个
软件 重置 bit 这 内容 的 这 DOR 是 设置 至 00
(十六进制) 之后 一个 硬件 reset 和 是 unaffected 用 一个 软-
ware reset 这 DOR 能 是 写 至 在 任何 time
DOR
D7 D6 D5 D4 D3 D2 D1 D0
DESC
MTR3 MTR2 MTR1 MTR0 DMAEN 重置
驱动 驱动
SEL 1 SEL 0
重置
0000 0 0 0 0
COND
D7 发动机 使能 3
这个 位 控制 这 MTR3
disk 接口 输出A1in这个 位 导致 这
MTR3 管脚 至 go active 这 真实的 水平的 的
MTR3 取决于 在 这 状态 的 这 INVERT
pin
D6 发动机 使能 2
一样 函数 作 D7 除了
为 MTR2
D5 发动机 使能 1
一样 函数 作 D7 除了
为 MTR1
D4 发动机 使能 0
一样 函数 作 D7 除了
为 MTR0
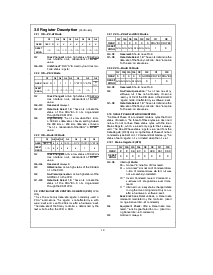
D3 DMA Enable
这个 位 有 二 模式 的 opera-
tion
pc-在 模式 或者 模型 30 mode
Writing
一个 1 至 这个 位 将 使能 这 DRQ DAK
INT
和 TC pins Writinga0to这个 位 将
触发-状态 DRQ 和 INT 和 使不能运转 DAK
和
TC 这个 位 是 一个 0 之后 一个 重置 当 在 这些
modes
PS2 mode
这个 位 是 reserved 和
这 DRQ DAK
INT 和 TC 管脚 将 总是 是
enabled 在 一个 reset 这 DRQ DAK
和
INT 线条 将 仍然是 enabled 和 D3 将 是 一个
0
D2 重置 Controller
Writinga0to这个 位 resets
这 controller 它 将 仍然是 在 这 重置 condi-
tion untila1is写 至 这个 bit 一个 软件
重置 做 不 影响 这 DSR CCR 和 其它
位 的 这 DOR 一个 软件 重置 将 影响 这
配置 和 模式 command 位 (看 秒-
tion 40 Command 设置 描述) 这 迷你-
mum 时间 那 这个 位 必须 是 低 是 100 ns
Thus toggling 这 重置 控制 位 在
consecutive 写 至 这 DOR 是 一个 可接受的
方法 的 issuing 一个 软件 reset
D1–D0 驱动 Select
这些 二 位 是 二进制的 encod-
ed 为 这 四 驱动 选择 DR0–DR3 所以 那
仅有的 一个 驱动 选择 输出 是 起作用的 在 一个 time
这 真实的 水平的 的 这 驱动 选择 输出 是
决定 用 这 状态 的 这 INVERT
pin
它 是 一般 程序编制 实践 至 使能 两个都 这 mo-
tor 使能 和 驱动 选择 输出 为 一个 particular drive
表格 3-2 在下 显示 这 DOR 值 至 使能 各自 的
这 四 drives
表格 3-2 驱动 使能 值
驱动 DOR 值
0 1C (十六进制)
12D
24E
38F
10