1997 Oct 28 11
飞利浦 半导体 产品 规格
故障-tolerant 能 transceiver PCA82C252
t
pd(h)
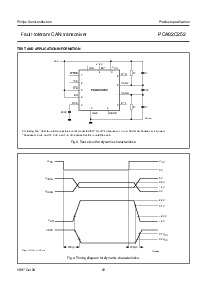
传播 延迟 txd-至-rxd
高
C1 = 100 pf; c2 = 0;
R
l
= 100
Ω
; 非 failures 和 总线
failures 1, 2 和 5
−
0.75 1.25
µ
s
C1 = C2 = 3.3 nf; r
l
= 100
Ω
;
非 failures 和 总线 failures
1 和 2
−
1 1.5
µ
s
C1 = 100 pf; c2 = 0;
R1 = 100
Ω
;
总线 failures 3, 4, 6 和 7
−
0.85 1.3
µ
s
C1 = C2 = 3.3 nf; r1 = 100
Ω
;
总线 failures 3, 4, 5, 6 和 7
−
1.4 2.1
µ
s
t
wo(最小值)
最小 首要的 时间 为
wake-向上 在 canl 或者 canh
低 电源 模式 v
BAT
=12V 8
−
38
µ
s
t
wake(最小值)
最小 wake 低 时间 为
wake-向上
低 电源 模式 v
BAT
=12V 8
−
38
µ
s
t
失败
failures 3 和 6 发现 时间 正常的 模式 10
−
60
µ
s
失败 3 恢复 时间 正常的 模式 10
−
60
µ
s
失败 6 恢复 时间 正常的 模式 150
−
750
µ
s
failures 4 和 7 发现 时间 正常的 模式 0.75
−
4.0 ms
failures 4 和 7 恢复 时间 正常的 模式 10
−
60
µ
s
failures 3, 4 和 7 发现 时间 低 电源 模式; v
BAT
= 12 V 0.8
−
8.0 ms
failures 3, 4 和 7 恢复 时间 低 电源 模式; v
BAT
=12V
−
4
−
ms
t
h(最小值)
最小 支撑 时间 至 go 至
睡眠 command
5
−
50
µ
s
∆
ec 边缘-计数 区别 在
canh 和 canl 为 failures 1,
2 和 5 发现 (nerr
变为 低)
正常的 模式
−
3
−
边缘-计数 区别 在
canh 和 canl 为 failures 1,
2 和 5 恢复
正常的 模式
−
1
−
标识 参数 情况 最小值 典型值 最大值 单位