2004 三月 04 6
飞利浦 半导体 产品 规格
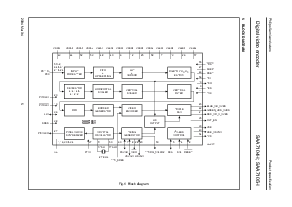
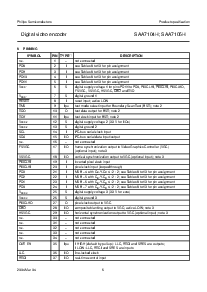
数字的 video encoder saa7104h; saa7105h
6 固定
标识 管脚 类型
(1)
描述
n.c. 1
−
不 连接
PD8 2 I 看 Tables 8 至 13 为 管脚 分派
PD9 3 I 看 Tables 8 至 13 为 管脚 分派
PD10 4 I 看 Tables 8 至 13 为 管脚 分派
PD11 5 I 看 Tables 8 至 13 为 管脚 分派
V
DDD1
6 S 数字的 供应 电压 1 为 管脚 pd11 至 pd0, pixclki, pixclki, pixclko,
fsvgc, vsvgc, hsvgc, cbo 和 tvd
V
SSD1
7 S 数字的 地面 1
重置 8 I 重置 输入; 起作用的 低
TMS 9 i/pu 测试 模式 选择 输入 为 boundary scan 测试 (bst); 便条 2
TDO 10 O 测试 数据 输出 为 bst; 便条 2
TCK 11 i/pu 测试 时钟 输入 为 bst; 便条 2
V
DDD2
12 S 数字的 供应 电压 2 (3.3 v 为 i/os)
V
SSD2
13 S 数字的 地面 2
SCL 14 I I
2
c-总线 串行 时钟 输入
SDA 15 i/o I
2
c-总线 串行 数据 输入/输出
n.c. 16
−
不 连接
FSVGC 17 i/o 框架 同步 输出 至 video graphics 控制 (vgc)
(optional 输入); 便条 3
VSVGC 18 i/o vertical 同步 输出 至 vgc (optional 输入); 便条 3
PIXCLKI 19 I inverted pixel 时钟 输入
PIXCLKI 20 I pixel 时钟 输入 (looped 通过)
PD3 21 I MSB
−
4 和 c
B
-y-c
R
4 : 2 : 2; 看 Tables 8 至 13 为 管脚 分派
PD2 22 I MSB
−
5 和 c
B
-y-c
R
4 : 2 : 2; 看 Tables 8 至 13 为 管脚 分派
PD1 23 I MSB
−
6 和 c
B
-y-c
R
4 : 2 : 2; 看 Tables 8 至 13 为 管脚 分派
PD0 24 I MSB
−
7 和 c
B
-y-c
R
4 : 2 : 2; 看 Tables 8 至 13 为 管脚 分派
V
DDD3
25 S 数字的 供应 电压 3 (3.3 v 为 核心)
V
SSD3
26 S 数字的 地面 3
PIXCLKO 27 O pixel 时钟 输出 至 vgc
CBO 28 i/o composite blanking 输出 至 vgc; 起作用的 低; 便条 3
HSVGC 29 i/o horizontal 同步 输出 至 vgc (optional 输入); 便条 3
n.c. 30
−
不 连接
n.c. 31
−
不 连接
n.c. 32
−
不 连接
n.c. 33
−
不 连接
n.c. 34
−
不 连接
输出_en 35 i/pu 如果 高 (default 用 拉-向上): llc, rtci 和 sres 是 输出;
如果 低: llc, rtci 和 sres 是 输入
LLC 36 i/o 线条-锁 时钟
RTCI 37 i/o real-时间 控制 输入