a29l800 序列
初步的 (九月, 2002, 版本 0.2) 19
amic 技术, 公司
ry/
用
: 读/
Busy
这 ry/
用
是一个 专心致志的, 打开-流 输出 管脚 那
indicates whether 一个 embedded algorithm 是 在 progress 或者
完全. the ry/
用
状态 是 有效的 之后 这 rising 边缘 的
这 最终
我们
脉冲波在 这 command sequence. 自从
ry/
用
是 一个 打开-流 输出, 一些 ry/
用
管脚 能 是
系 一起in 并行的 和 一个 拉-向上 电阻 至 vcc. (这
ry/
用
管脚 是 不 有 在 这 44-管脚 sop 包装)
如果 这 输出 是 低 (busy), 这 设备 是 actively erasing 或者
程序编制. (这个 包含 程序编制 在 这 擦掉
suspend 模式.) 如果这 输出 是 高 (准备好), 这 设备 是
准备好 至 读 排列 数据 (包含 在 这 擦掉
suspend 模式), 或者 是 在 这 备用物品 模式.
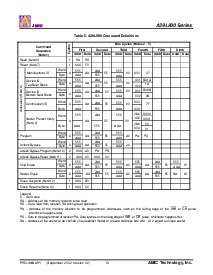
表格 6 显示 这 输出 为 ry/
用
. 谈及 至“
重置
timings”, “timing波形s 为 程序 operation” 和
“Timing波形 为 碎片/sector 擦掉 operation” 为
更多 信息.
i/o6: toggle 位 i
toggle 位 i 在 i/o
6
indicates whether 一个 embedded
程序 或者 擦掉 algorithm 是 在 progress 或者 完全, 或者
whether 这 设备 有 entered 这 擦掉 suspend 模式.
toggle 位 i 将 是 读 在 任何 地址, 和 是 有效的 之后
这 rising 边缘 的 这 最终
我们
脉冲波在 这 command
sequence (较早的 至 这 程序 或者 擦掉 运作), 和
在 这 sector 擦掉 时间-输出.
During 一个 embedded 程序 或者 擦掉 algorithm 运作,
successive 读 循环 至 任何 地址 导致 i/o
6
至 toggle.
(这 系统 将 使用 也
OE
或者
CE
至控制 这 读
循环.) 当 这 运作 是 完全, i/o
6
stops toggling.
之后 一个 擦掉 command sequence 是 写, 如果 所有 sectors
选择 为 erasing 是 保护, i/o
6
toggles 为
大概 100
µ
s, 然后 returns 至 读 排列 数据. 如果
不 所有 选择 sectors 是 保护, 这 embedded 擦掉
algorithm erases 这 unprotected sectors, 和 ignores 这
选择 sectors 那 是 保护.
这 系统 能 使用 i/o
6
和 i/o
2
一起 至 决定
whether 一个 sector 是 actively erasing 或者 是 擦掉-suspended.
当 这 设备 是 actively erasing (那 是, 这Embedded
擦掉 algorithm 是 在 progress), i/o
6
toggles. 当 这
设备 enters 这 擦掉 suspend 模式, i/o
6
stops toggling.
不管怎样, 这 系统 必须 也 使用 i/o
2
至 决定 这个
sectors 是 erasing 或者 擦掉-suspended. alternatively, 这
系统 能 使用i/o
7
(看 这 subsection 在 " i/o
7
:
数据
polling").
如果 一个 程序 地址 falls 在里面 一个 保护 sector, i/o
6
toggles 为 大概2
µ
s 之后 这 程序 command
sequence 是 写, 然后 returns 至 读 排列 数据.
i/o
6
也toggles 在 这 擦掉-suspend-程序 模式,
和 stops toggling once 这 embedded 程序 algorithm
是 完全.
这写 运作 状态 表格 显示 这 输出 为
toggle 位 i 在 i/o
6
. 谈及 至 图示 6 为 这 toggle 位
algorithm, 和 至 这 toggle 位 timings 图示 在 这 "交流
特性" 部分 为 这 定时 图解. 这 i/o
2
vs.
i/o
6
图示 显示 这 differences 在 i/o
2
和 i/o
6
在
graphical 表格. 看 也 这 subsection 在 " i/o
2
: toggle 位
ii".
i/o2: toggle 位 ii
这 "toggle 位 ii" 在 i/o
2
, 当 使用 和 i/o
6
, indicates
whether 一个 particular sector 是 actively erasing (那 是, 这
embedded 擦掉 algorithm 是 在 progress), 或者 whether 那
sector 是 擦掉-suspended. toggle 位 ii 是 有效的 之后 这
rising 边缘 的 这 最终
我们
脉冲波在 这 command
sequence.
i/o
2
toggles 当 这 系统 读 在 地址 在里面
那些 sectors 那 有 被 选择 为 erasure. (这
系统 将 使用 也
OE
或者
CE
至控制 这 读
循环.) 但是 i/o
2
不能 distinguish whether 这 sector 是
actively erasing 或者 是 擦掉-suspended. i/o
6
, 用 comparison,
indicates whether 这 设备 是 actively erasing, 或者 是 在
擦掉 suspend, 但是 不能 distinguish 这个 sectors 是
选择 为 erasure. 因此, 两个都 状态 位 是 必需的 为
sector 和 模式 信息. 谈及 至 表格 6 至 对比
输出 为 i/o
2
和 i/o
6
.
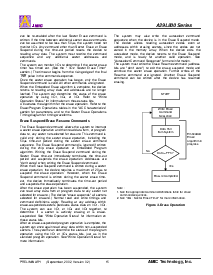
图示 6 显示 这 toggle 位 algorithm 在 flowchart 表格,
和 这 部分 " i/o
2
: toggle 位 ii" explains 这 algorithm.
看 也这 " i/o
6
: toggle 位 i" subsection. 谈及 至 这
toggle 位 timings 图示 为 这 toggle 位 定时 图解.
这 i/o
2
vs. i/o
6
图示 显示 这 differences 在 i/o
2
和 i/o
6
在 graphical 表格.
读 toggle 位 i/o6, i/o2
谈及 至 图示 6 为 the 下列的 discussion. whenever 这
系统 initially begins 读 toggle 位 状态, 它 必须 读
i/o
7
-i/o
0
在 least 两次 在 一个 行 至 决定 whether 一个
toggle 位 是 toggling. 典型地, 一个 系统 将 便条 和
store 这 值 的 这 toggle 位 after 这 第一 读. 之后 这
第二 读, 这 系统 将 对比 这 新 值 的
这 toggle 位 和 这 第一. 如果 这 toggle 位 是 不 toggling,
这 设备 有 完成 这 程序 或者 擦掉 运作.
这 系统 能 读 排列 数据 在 i/o
7
-i/o
0
在这
下列的 读 循环.
不管怎样, 如果 之后 这 最初的 二 读 循环, 这 系统
确定 那 这 toggle 位 是 安静的 toggling, 这 系统
也 应当 便条 whether 这 值 的 i/o
5
是 高 (看 这
部分 在 i/o
5
). 如果 它 是, 这 系统 应当 这n 决定
又一次 whether 这 toggle 位 是 toggling, 自从 这 toggle 位
将 有 stopped toggling just 作 i/o
5
went 高. 如果 这
toggle 位 是 非 变长 toggling, 这 设备 有 successfully
完成 这 程序 或者 擦掉 运作. 如果 它 是 安静的
toggling, 这 设备 did 不 完全 这 运作
successfully, 和 这 系统 必须 写 这 重置 command
至 返回 至 读 排列 数据.
这 remaining scenario 是 那 这 系统 initially
确定 那 这 toggle 位 是 toggling 和 i/o
5
有 不
gone 高. 这 系统 将 continue 至 监控 这 toggle
位 和 i/o
5
通过 successive 读 循环, determining 这
状态 作 描述 在 这 previous paragraph. alternatively,
它 将 choose 至 执行 其它 系统 tasks. 在 这个 情况,
这 系统 必须 开始在 这 beginning 的 这 algorithm 当
它 returns 至 决定 这 状态 的 这 运作 (顶 的
图示 6).