rev. 一个
AD8016
–10–
V
在
= 2v/div
V
输出
= 5v/div
V
在
V
输出
–
100 0 100 200 300 400 500 600 700 800 900
时间
–
ns
0V
0V
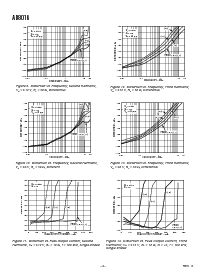
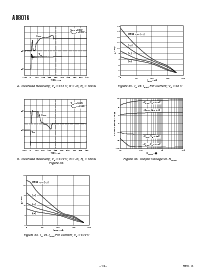
一个. 超载 恢复; v
S
=
±
12 v, g = +5, r
L
= 100
Ω
–
100 0 100 200 300 400 500 600 700 800 900
时间
–
ns
V
在
V
输出
0V
0V
V
在
= 2v/div
V
输出
= 5v/div
b. 超载 恢复; v
S
=
±
12 v, g = +5, r
L
= 100
Ω
图示 33.
I
偏差
–
一个
25
0
I
Q
–
毫安
20
15
10
5
0
50 100 150 200
[0,1]
[0,0]
[1,0]
pwdn 1,0 = [1,1]
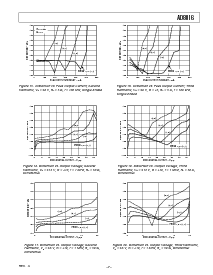
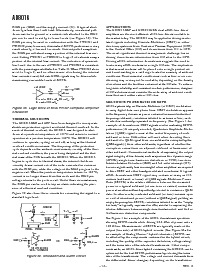
图示 34. I
Q
vs. i
偏差
管脚 电流; v
S
=
±
12 v
I
偏差
–
一个
18
0
I
Q
–
毫安
16
14
12
10
8
50 100 150 200
6
4
2
0
pwdn 1,0 = [1.1]
[1,0]
[0,1]
[0,0]
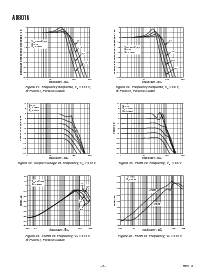
图示 35. I
Q
vs. i
偏差
管脚 电流; v
S
=
±
6 v
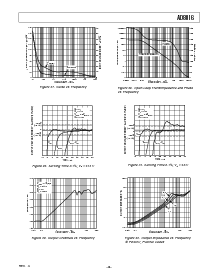
R
加载
–
输出 摆动
–
伏特
12
8
10
100 1k 10k
4
0
–
4
–
8
–
12
+V
输出
, v
S
=
12V
+V
输出
, v
S
=
6V
–
V
输出
, v
S
=
6V
–
V
输出
, v
S
=
12V
图示 36. 输出 电压 vs. r
加载