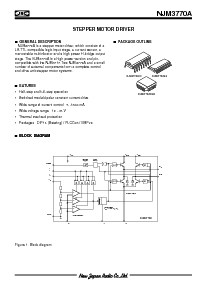
NJM3770A
电流 水平的 选择.
这 状态 的 i
0
和 i
1
输入 确定 这 电流 水平的 在 这 发动机 winding. 三 fixed 电流 水平 能 是
选择 符合 至 这 表格 在下.
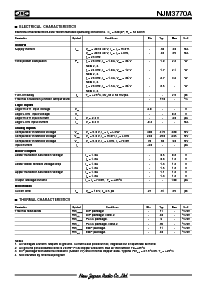
发动机 电流 I
0
I
1
高 水平的 100% L L
中等 水平的 60% H L
低 水平的 20% L H
零 电流 0% H H
这 明确的 值 的 这 不同的 电流 水平 是 决定 用 这 涉及 电压 v
R
一起 和 这
值 的 这 感觉到 电阻 r
S
.
这 顶峰 发动机 电流 能 是 计算 作 跟随:
i
m
= (v
R
• 0.080) / r
S
[a], 在 100% 水平的
这 发动机 电流 能 也 是 continuously varied 用 调节 这 电压 涉及 输入.
电流 传感器
这 电流 传感器 包含 一个 涉及 电压 分隔物 和 三 comparators 为 测量 各自 的 这 可选择的
电流 水平. 这 发动机 电流 是 sensed 作 一个 电压 漏出 横过 这 电流 感觉到 电阻, r
S
, 和 对照的
和 一个 的 这 电压 references 从 这 分隔物. 当 这 二 电压 是 equal, 这 比较器 triggers 这
单独的-脉冲波 发生器. 仅有的 一个 比较器 在 一个 时间 是 使活动 用 这 输入 逻辑.
单独的-脉冲波 发生器
这 脉冲波 发生器 是 一个 monostable 多谐振荡器 triggered 在 这 积极的 边缘 的 这 比较器 输出. 这
多谐振荡器 输出 是 高 在 这 脉冲波 时间, t
止
, 这个 是 决定 用 这 定时 组件 r
T
和 c
T
.
t
止
= 0.69 • r
T
• c
T
这 单独的 脉冲波 switches 止 这 电源 喂养 至 这 发动机 winding, 造成 这 winding 至 decrease 在 t
止
.
如果 一个 新 触发 信号 应当 出现 在 t
止
, 它 是 ignored.
输出 平台
这 输出 平台 包含 四 晶体管 和 二 二极管, 连接 在 一个 h-桥. 便条 那 这 upper recircula-
tion 二极管 是 连接 至 这 电路 externally. 这 二 sinking 晶体管 是 使用 至 转变 这 电源 有提供的
至 这 发动机 winding, 因此 驱动 一个 常量 电流 通过 这 winding. 看 计算数量 3 和 4.
超载 保护
这 电路 是 配备 和 一个 热的 shut-向下 函数, 这个 将 限制 这 接合面 温度. 这 输出 电流
将 是 减少 如果 这 最大 容许的 接合面 温度 是 超过. 它 应当 是 指出, 不管怎样, 那 它 是
不 短的 电路 保护.
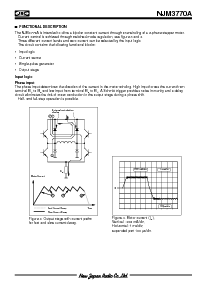
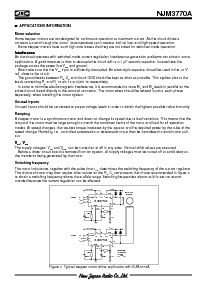
运作
当 一个 电压 v
MM
是 应用 横过 这 发动机 winding, 这 电流 上升 跟随 这 等式:
i
m
= (v
MM
/ r) • (1 - e
-(r • t ) / l
)
R = winding 阻抗
L = winding 电感
t = 时间
(看 图示 3, arrow 1)
这 发动机 电流 呈现 横过 这 外部 感觉到 电阻, r
S
, 作 一个 相似物 电压. 这个 电压 是 喂养
通过 一个 低-通过 过滤, r
C
C
C
, 至 这 电压 比较器 输入 (管脚 10). 在 这 moment 这 sensed 电压 rises
在之上 这 比较器 门槛 电压, 这 monostable 是 triggered 和 它的 输出 转变 止 这 组织 下沉
晶体管.这 极性 横过 这 发动机 winding reverses 和 这 电流 是 强迫 至 circulate 通过 这 appropri-
ate upper 保护 二极管 后面的 通过 这 源 晶体管 (看 图示 3, arrow 2).
之后 这 monostable 有 安排时间 输出, 这 电流 有 decayed 和 这 相似物 电压 横过 这 感觉到 电阻 是
在下 这 比较器 门槛 水平的.这 sinking 晶体管 然后 转变 在 和 这 发动机 电流 开始 至 增加
又一次, 这 循环 是 重复的 直到 这 电流 是 转变 止 通过 这 逻辑 输入.当 两个都 i
1
和 i
0
是 高, 所有 四
晶体管 在 这 输出 h-桥 是 转变 止, 这个 意思 那 inductive 电流 recirculates 通过 二 opposite
自由-转动 二极管 (看 图示 3, arrow 3). 这个 方法 的 turning 止 这 电流 结果 在 一个 faster 电流 decay
比 如果 仅有的 一个 晶体管 是 转变 止 和 将 因此 改进 速 效能 在 half-stepping 模式.